
Using virtual testing to calculate braking performance
Manufacturers must spend significant time and cost on rail vehicle commissioning and authorization, particularly for safety-critical subsystems such as the braking system. Evaluating braking performance during the commissioning and approval process is a costly, resource-intensive process. The rapid progress of digitalization now presents rail vehicle manufacturers and operators with an attractive option: to transfer parts of the commissioning and approval process into the virtual world without compromising safety. Knorr-Bremse Rail Vehicle Systems is pursuing a promising “digital twin” approach that combines a physically deterministic model with statistical modeling to quantify stopping distance uncertainties. Although the regulations and standards relating to the use of simulation for rail vehicle authorization are still under development, virtual testing has great potential for significantly reducing the time and cost of product commissioning and approval, and consequently also time to market.
Physical approval tests are expensive and time-consuming
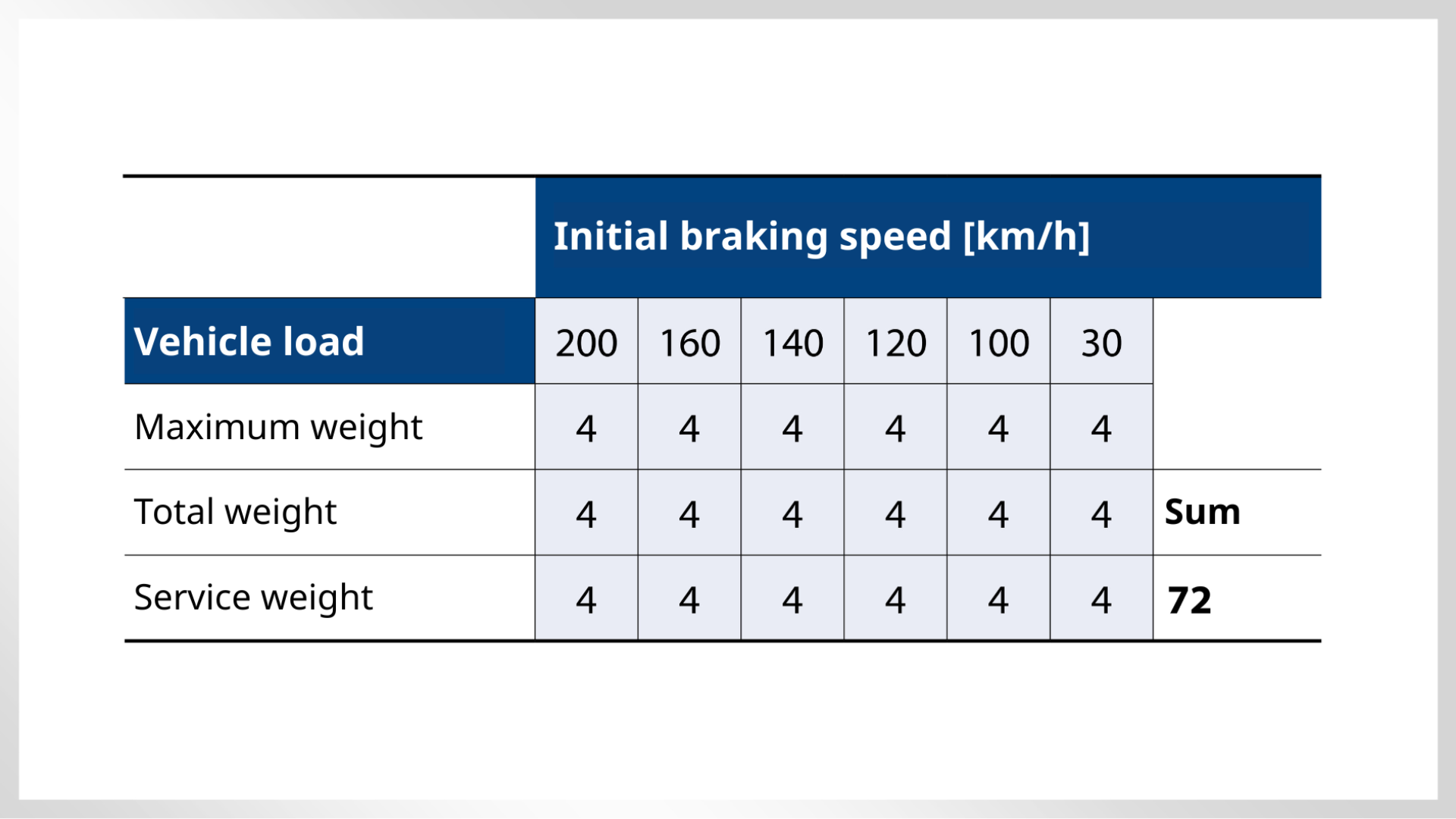
According to EU regulations (LOC & PAS TSI, Commission Regulation (EU) 1302/2014) and European standards (EN16834 in particular), the braking performance of rail vehicles must be calculated by performing a wide variety of test runs featuring numerous maneuvers in which the vehicle is braked to a standstill. The following table shows examples of the braking maneuvers required by LOC & PAS TSI to test emergency braking alone for a multiple unit with a maximum speed of 200 km/h.
The regulations prescribe a similar series of tests for relevant combinations of installed brake types (such as electrodynamic or magnetic track brakes) for full-power service braking maneuvers, as well as wheel-slide protection tests in low-adhesion conditions.
Friction pairs need some time to cool down, which significantly prolongs test lengths. Around half an hour of cooling time is required after a high-energy braking maneuver involving maximum braking mass traveling at an initial speed of 200 km/h. Consequently, a total time of up to six months must be allowed for physical test runs during the commissioning and approval process.
This is further complicated by the fact that the capacity of the few officially approved test circuits falls well short of demand. And on the tightly scheduled rail network itself, only a few dedicated time slots are available for test runs.
Virtual tests for vehicle approval purposes
There is, of course, no alternative to comprehensive vehicle validation. But the rapid progress of digitalization is opening up some attractive options for transferring substantial portions of the still purely physical approval runs to more energy-efficient, lower-emission virtual space. At the same time, the fundamental premise still applies: Safety must not be compromised.
During the rail vehicle design phase, the industry has been using tools (such as TrainBraC) to calculate braking capacity for many years. Thus a wealth of experience in using such tools already exists. So it makes sense to use these tools not just at the design stage, but also during the commissioning and approval process. This could significantly reduce the cost and time overheads incurred.
“Digital twins” – an approach to quantifying stopping distance uncertainties
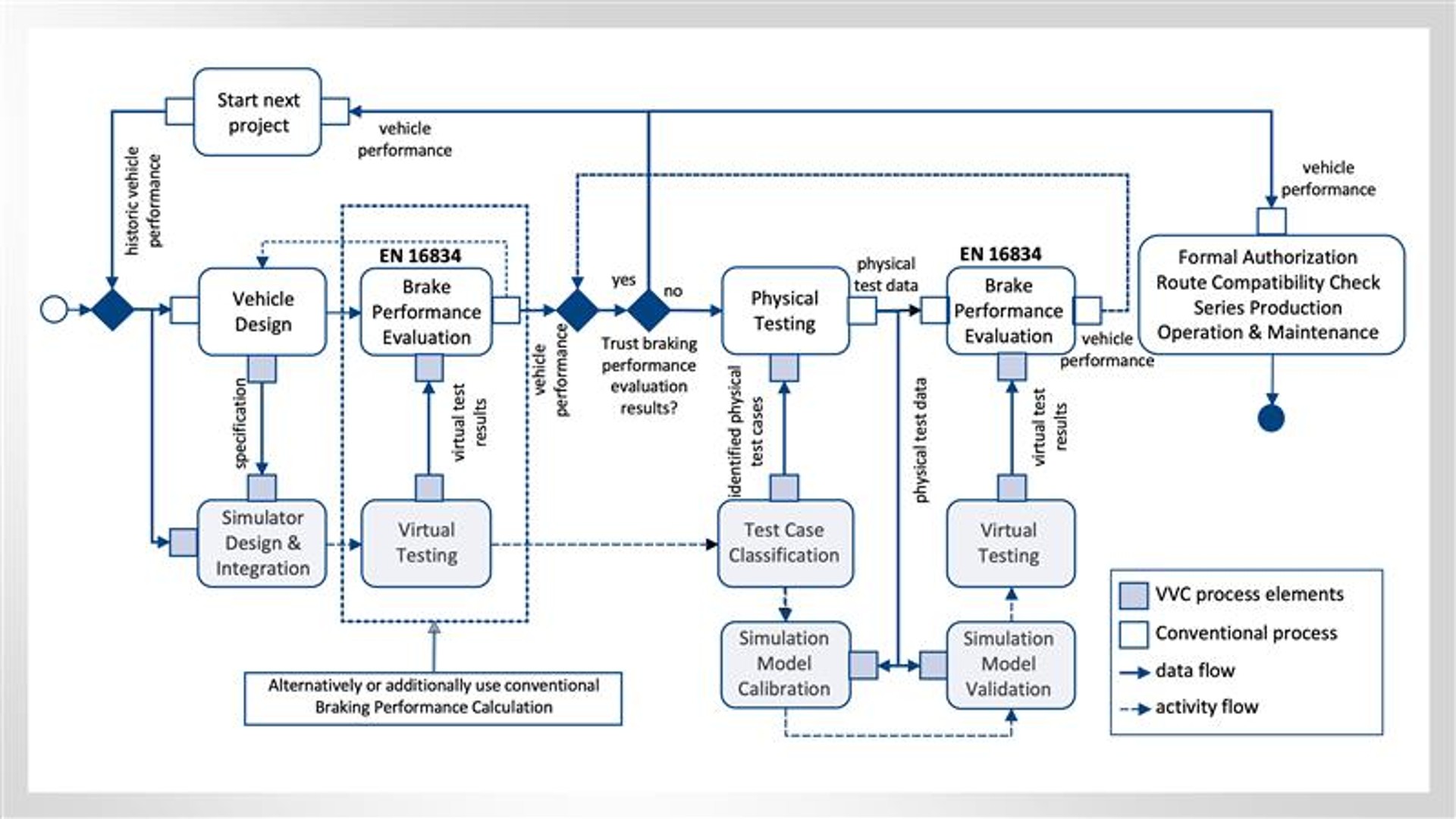
A highly promising “digital twin” approach involves interaction between a physically deterministic vehicle model and the statistical modeling of stopping distance uncertainties. Specifically, it consists of the following five phases:
1. Simulator Design & Integration: development/customization of a simulation model and simulator.
2. Test Case Classification: deciding which of the prescribed test runs should take place physically and which could take place virtually.
3. Simulation Model Calibration: defining certain parameters, such as the friction behavior of pads/discs or blocks/wheels (based on measurements taken during physical test drives) in the simulator’s deterministic, statistical model.
4. Simulation Model Validation: validation of calibrated models based on the remaining physical test results.
5. Virtual Testing: simulation of test cases which are no longer performed physically and (optional) calculation of the test vehicle’s braking capacity.
Because virtual tests for calculating braking performance are intended to replace physical tests, the virtual tests must deliver comparable results. In addition to stopping distances and average deceleration, this includes mapping the behavior over time of a wide variety of variables such as vehicle speed, deceleration and brake cylinder pressure.
The starting point for this is a physically deterministic, EN 14531-compliant vehicle model based on constant, known parameters. However, various factors that influence braking behavior – such as friction coefficients, friction radii and the braking system’s pneumatic behavior – are not actually constants and in many cases, are not even measurable. Consequently, they cannot be adequately represented by a physically deterministic vehicle model. It should now be possible to use statistical modeling techniques to quantify these uncertainties related to stopping distance, as well as any other variables to be measured.
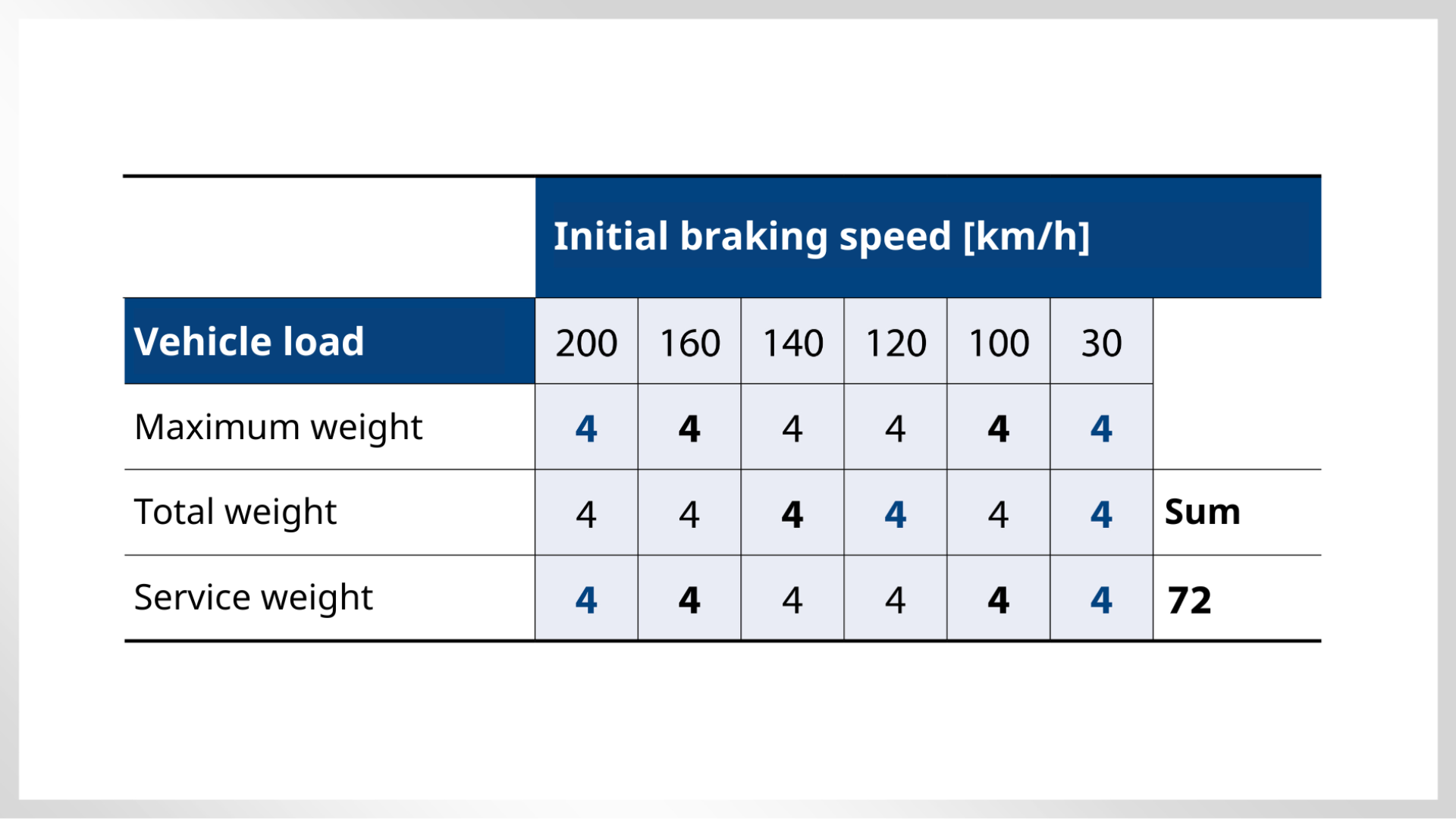
Table 2 shows the results of the Test Case Classification phase in simplified form: During the Simulation Model Calibration phase, test cases highlighted in blue are used to adjust defined simulator parameters. The subsequent Simulation Model Validation phase involves validating the emboldened simulator test cases. For both kinds of test cases, physical tests are required for comparison with the simulator results. Following successful validation, results for the non-emboldened test cases can be generated solely through Virtual Testing – physical tests are no longer required. In the example, this means that the physical test volume has been reduced by 44 percent. The ratio of physical to virtual tests is heavily dependent on prior knowledge from similar projects, thus on the availability of comparable simulation models that have already been validated for similar vehicle types, as well as data from test runs or test rigs.
Once the simulation model has been calibrated, probability distributions are used to validate it – these must fall within the range of physical test data required for this purpose pursuant to EN 16834[1]. Following successful validation, this statistical model now forms the basis of the Virtual Testing phase for predicting braking behavior and stopping distances, i.e. using tests that are not physically performed. Finally, just as in physical tests, the virtual test results are used to calculate braking performance figures.
[1] DIN EN 16834 (criteria C1, C2)
Results of Simulation Model Calibration and Simulation Model Validation
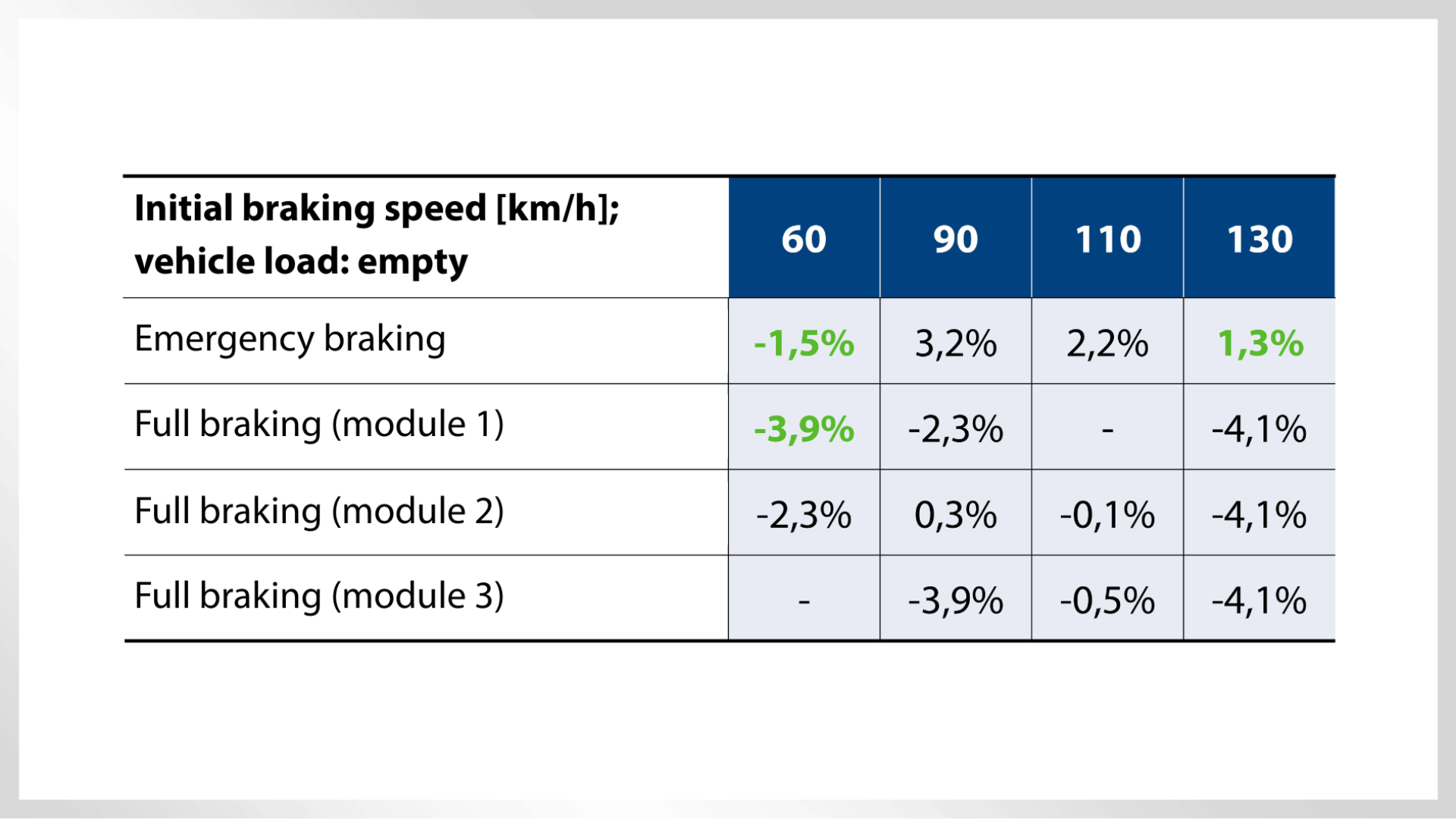
Table 3 below shows typical results of relative errors in the deterministic simulation of a 10-car multiple unit subjected to the Simulation Model Calibration (highlighted in green) and Simulation Model Validation process steps. The table shows the relative error in stopping distance.
e = (ssim - smeas) / smeas × 100
Derived from criteria C1 and C2 in the current EN 16834 standard, a relative error of ±1.95σ_n=±5.85% is defined as an indicator of sufficient correlation between simulator and real-world vehicle. In Table 3, the largest relative error of max. 4.1% thus makes it possible to reliably predict the stopping distance of the vehicle under observation.
In the medium to long term, it is probable that thanks to the growing use of “digital twins” and the associated increase in available models and data for similar vehicles, it will be possible to gradually reduce the number of physical tests without compromising safety.
Incorporating models into valid guidelines
Virtual testing stands and falls according to the degree of trust placed by lawgivers, users and other stakeholders in the simulation results. For simulations to be credible (“simulation credibility”), it is vital to document the simulation process described above in detail, and to maintain end-to-end transparency. This includes explicit statements to the effect that erroneous simulation results can produce a calculated braking performance that deviates from the vehicle’s real-world braking performance figures. In practice, such results could cause trains to overshoot stop signals or cause other potentially unsafe operating situations. Consequently, a safety assessment must be carried out if the simulation is being used for approval and authorization purposes.
Specifically, performing virtual braking tests requires an amendment to the LOC & PAS TSI standards. In turn, this means specifying the most appropriate methods for performing virtual tests for calculating braking performance. Such a specification is already being drawn up by the European Committee for Standardization (CEN) as a European standard.
To implement this specification, the European Union Agency for Railways (ERA) requires a “common safety method on risk evaluation and assessment” (cf. CSMRA, Commission Regulation (EC) 352/2009 and supplementary Commission Implementing Regulation (EU) 402/2013). In response, potential risks are currently being analyzed in detail and appropriate measures for dealing with them implemented as requirements in the specification. The ERA is regularly updated on the status of implementation of the CSMRA standards. One consequence of this has been the establishment of a comprehensive quality management process for “digital twins”.
By drawing up a concept for integrating virtual approval runs into LOC & PAS TSI, a coalition of stakeholders has done important groundwork as part of the PIVOT2 project under the European Shift2Rail innovation and technology initiative and its successor, the Europe’s Rail Joint Undertaking (EU-Rail). Under the leadership of Knorr-Bremse, a task force from CEN working group TC256/SC03/WG47 is drawing up the abovementioned standards for the virtual testing of braking performance.
To ensure that the safety of the rail system is not compromised, the quality criteria for virtual approval runs and procedures must be comparable to the equivalent physical tests for calculating braking performance. Physical approval runs are performed by accredited test laboratories in compliance with the extensive quality requirements set out in ISO 17025. Thus quality assurance plays a key role in virtual approval runs. The technical requirements for the testing process – in this case, to evaluate a rail vehicle’s braking performance – are defined in EN 16834. In Germany, the process is audited by the German Accreditation Body (DAkkS).
Validated models can be used for virtual approval runs
As a manufacturer of braking systems for rail vehicles, Knorr-Bremse brings extensive expertise to bear on the design of braking systems. This includes comprehensive measurement campaigns carried out on wheel-slide protection and friction dynamometer test rigs, as well as the ATLAS (Advanced Test Laboratory for Adhesion-based Systems) test rig. Based on the resulting, highly detailed database built up over many years of testing applications, the company has developed a large number of validated models, and these can now be reused in the context of virtual approval runs.
Knorr-Bremse is currently developing a Virtual Validation for Certification (VV4C) product. This is a customizable digital product in three preconfigured variants: VV4C-as-a-Service, VV4C-as-a-Tool and VV4C-as-a-Platform. It embeds and processes testbench trials and real-world vehicle data from braking tests in a digital environment.
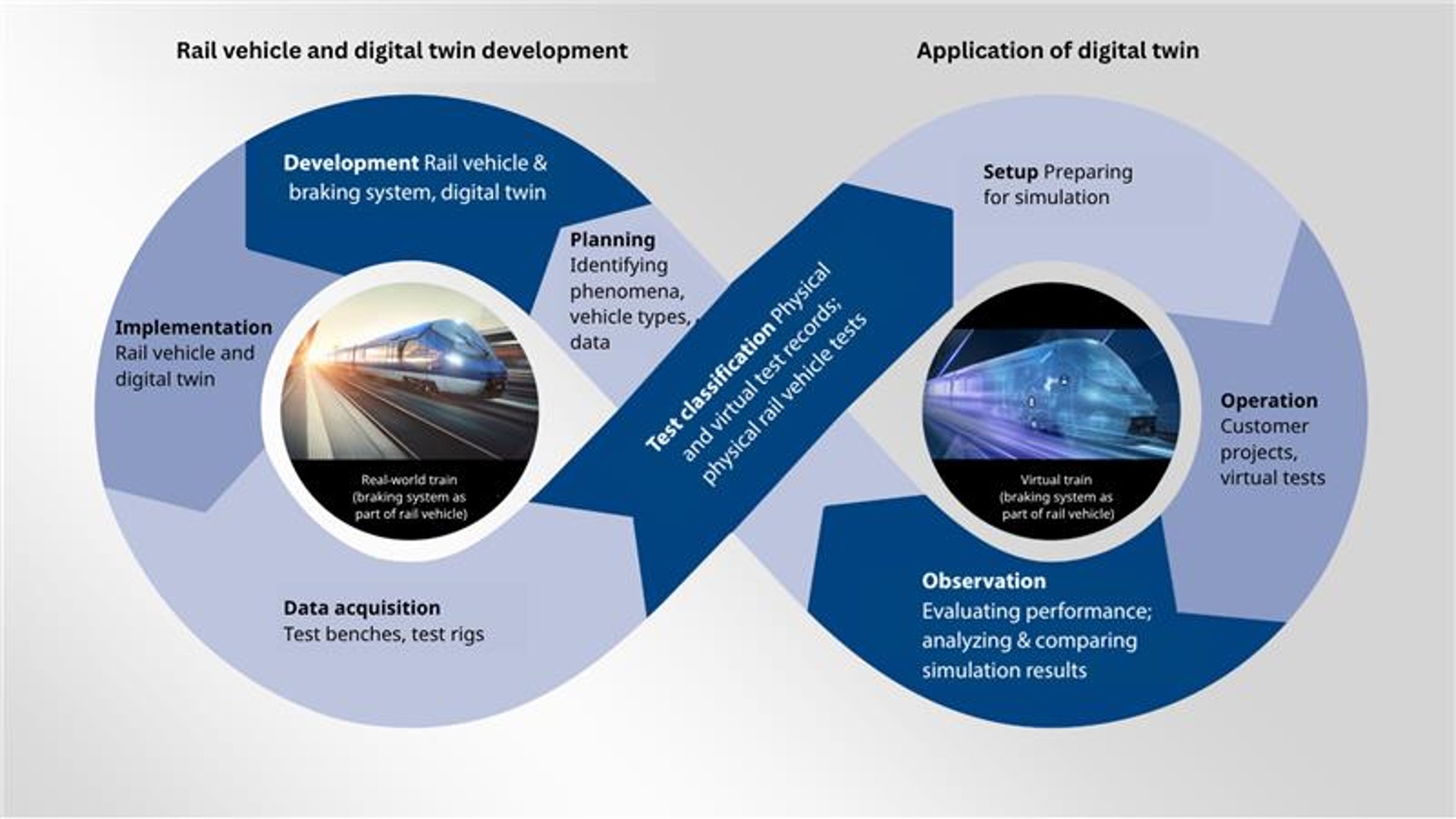
The integration of virtual with real “worlds” is a core part of this approach. The VV4C digital twin cycle is therefore based on the classic Development & Operations digital twin approach: It starts with data generated for the developed rail vehicle on the test track, or with braking system data obtained for the train in the course of testbench trials.
The next step is transferring this data to the virtual world. The Test Case Classification phase involves defining the tests required to calibrate and validate the model, as well as the tests required for Virtual Testing purposes. Following this phase, the virtual vehicle is set up to operate in the digital laboratory. The test results flow back into the real world, where the virtually calculated braking performance is subsequently used for vehicle approval purposes, and to specify stopping distances and maximum speeds. The knowledge acquired during this multi-step process is then fed back into the design process for new vehicles and braking systems.
Outlook
As we gradually transform individual modes of transportation into collective, resource-efficient, seamless mobility systems for a sustainable future, it is essential that we take full advantage of all potential opportunities to make ongoing progress. Fortunately, such opportunities are rife, especially in terms of industry digitalization. It is clear that they include the virtual evaluation of braking performance during vehicle design, commissioning and approval, as well as the prospective virtual testing of almost all other vehicle subsystems. In addition to tests for evaluating braking performance, the EU Rail program is already taking first steps toward the virtualization of functional braking system tests. Incorporating these tests into existing certification processes is undoubtedly an enormous challenge, but will add tremendous value for the rail system as a whole.

