

Boosting rail transportation capacity: Simulation reveals potential for optimized utilization of existing infrastructure
When rail transportation infrastructure reaches the limits of its capacity, only two options are open: build more tracks or improve the utilization of the existing infrastructure. One key factor in the latter option is the performance of the rail vehicle braking systems. Even from their maximum permissible speed and in poor adhesion conditions, trains must come safely to a halt within a defined block every single time. To this end, as part of a Reproducible Braking Distance (RBD) approach, Knorr-Bremse Rail Vehicle Systems is integrating an innovative deceleration control system with enhanced wheel slide protection and optimized – now train-wide − adhesion management. The next step is to prepare the ground for reducing the headway between trains without compromising on safety by ensuring predictable braking distance variation. A simulation study has now computed the highly promising effects in terms of rail infrastructure capacity.
Contact
Carina Smid Marketing Rail
80809 München
Deutschland - Germany
carina.smid@knorr-bremse.com
Conservative braking curves for high Emergency Brake Confidence Level (EBCL)
Driven by the trend towards urban living, the number of megacities is growing. According to the latest UN World Urbanization Prospects study, the proportion of the global population living in cities is set to rise from approximately 55% in 2018 to around two thirds in 2050 [1]. Given a parallel increase in rail passenger numbers, this trend is set to pose major challenges, especially for the mass transit sector. One key approach to solving this problem is to optimize utilization of the existing rail infrastructure.
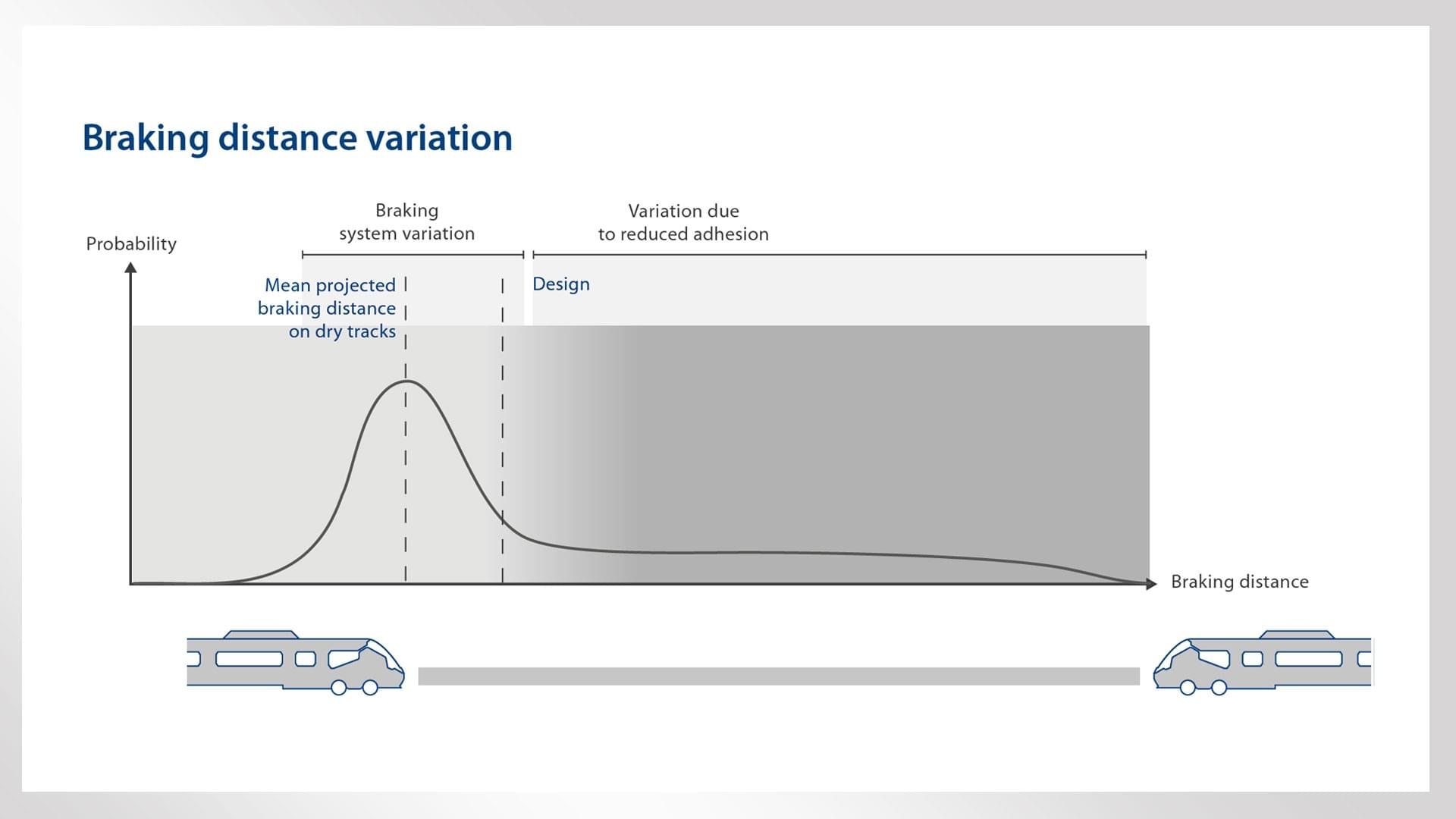
By way of background, we need to consider the regulations that currently define the limits of capacity utilization. At present, the track is divided into fixed blocks that may only be occupied by one train at a time, in order to prevent collisions. Moving blocks will only be possible in the future once ETCS Level 3 and CBTC (Communications-Based Train Control) have been implemented. Until now, extremely conservative underlying braking curves have been used to provide maximum safety, the aim being to ensure that trains come safely to a halt before reaching the danger point, even in adverse conditions.
The key parameters include the Emergency Brake Deceleration (EBD) and Service Brake Deceleration (SBD) curves and the particular characteristics of the vehicle or consist in question. There is some variation in the characteristic values of individual braking system components, such as cylinder pressure, caliper efficiency and friction parameters. Consequently, it is vital to know the probability of the train coming to a halt within the calculated braking distance on a dry track. This is described by the different Emergency Brake Confidence Levels (EBCLs). The higher the EBCL, the lower the probability of the train overshooting the specified braking distance on a dry track.
The EBCL probabilities are used to individually determine the safety level deemed necessary for a particular infrastructure, and can have values ranging from 0.5 to 10−9. A value of 0.5 means that the train will stop within the defined braking distance 50% of the time on a dry track. In Germany, the prescribed value for ETCS Level 2 is 10-7.
In poor adhesion conditions, e.g. on wet or dirty tracks, the sole basis for adjusting/increasing the safety margin of the chosen EBCL level is an additional parameter referred to as Kwet.
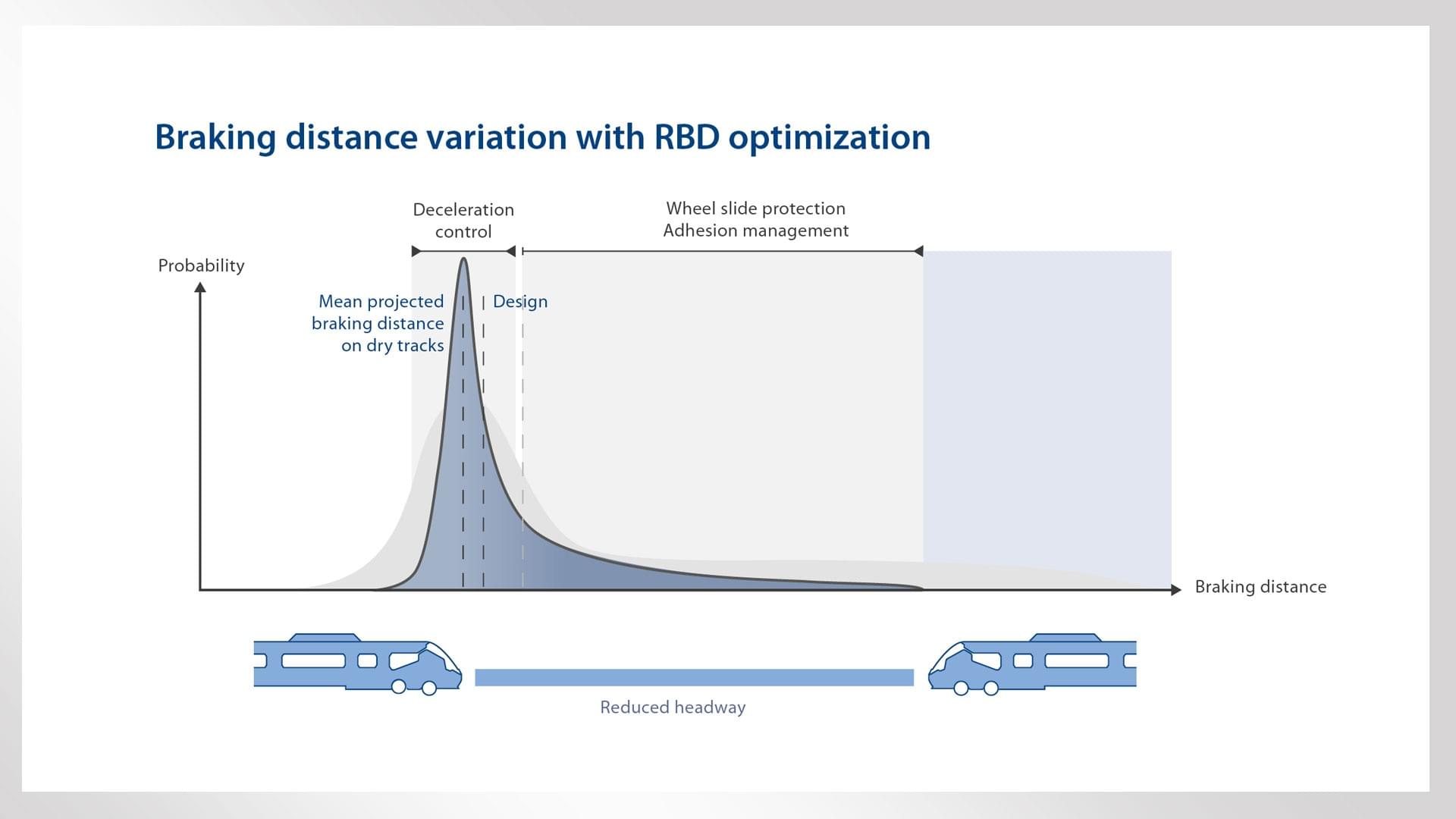
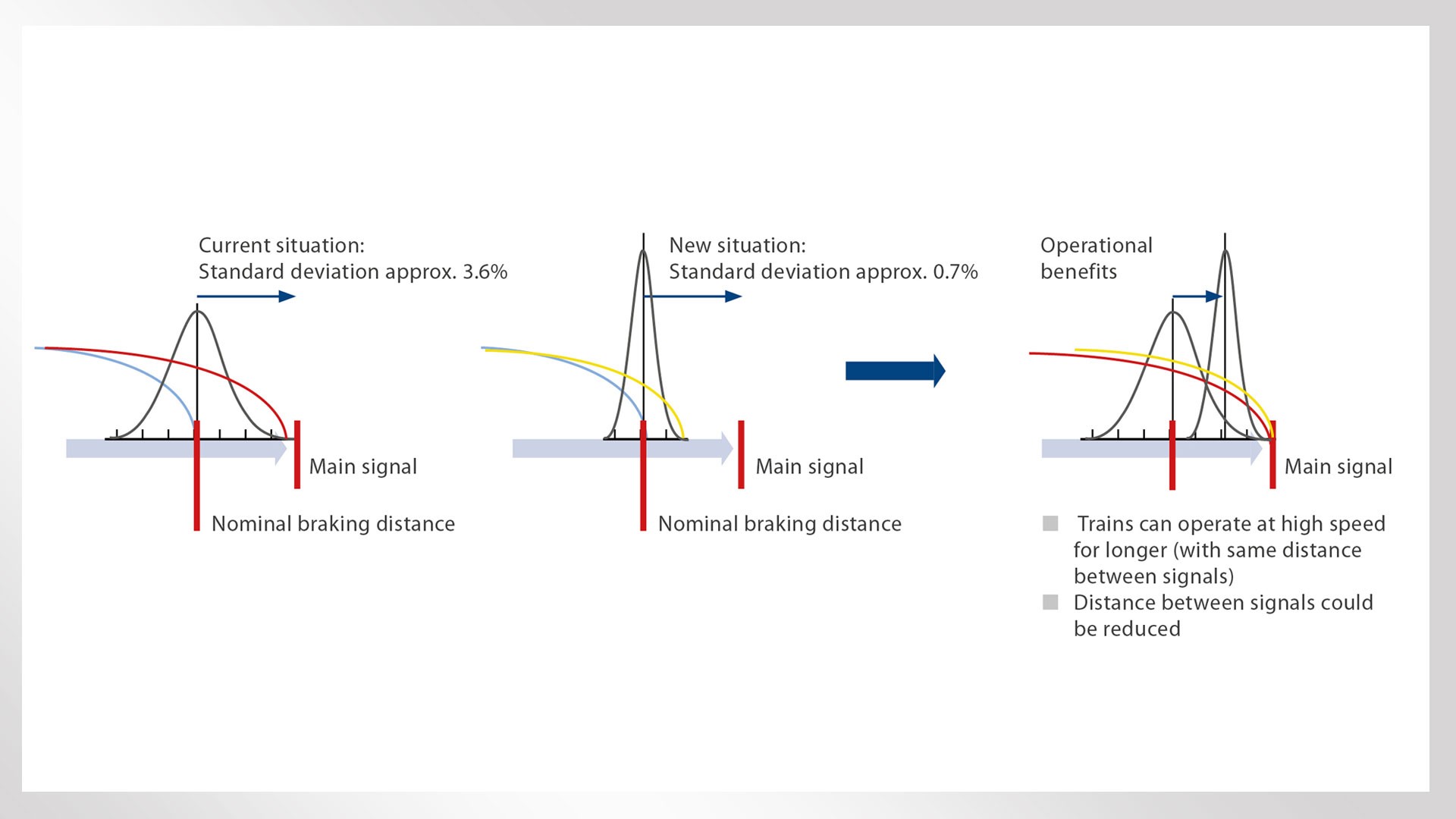
A control system that is largely able to compensate for the braking system tolerances can increase braking distance precision on a dry track. Add to this the ability to improve track conditions thanks to an accountable train-wide sanding system, and it becomes possible to reduce the headway between two trains without compromising safety (Figure 1 and Figure 2).
Summary
When rail transportation infrastructure reaches the limits of its capacity, only two options are open: build more tracks or improve the utilization of the existing infrastructure. One key factor in the latter option is the performance of the rail vehicle braking systems. Even from their maximum permissible speed and in poor adhesion conditions, trains must come safely to a halt within a defined block every single time. To this end, as part of a Reproducible Braking Distance (RBD) approach, Knorr-Bremse Rail Vehicle Systems is integrating an innovative deceleration control system with enhanced wheel slide protection and optimized – now train-wide − adhesion management. The next step is to prepare the ground for reducing the headway between trains without compromising on safety by ensuring predictable braking distance variation. A simulation study has now computed the highly promising effects in terms of rail infrastructure capacity.
An integrated approach to deceleration control, wheel slide protection and adhesion management
These considerations are at the heart of the new, integrated Reproducible Braking Distance (RBD) approach. RBD is based on three pillars: a new deceleration control system (DCC), the enhanced MGS3 wheel slide protection system and a train-wide sanding system (adhesion management).
The active deceleration control found in all types of braking system aims to decouple vehicle deceleration from variable vehicle and car parameters. To do this, the control system continuously compensates for the difference between the train deceleration measured by the relevant sensors and the target deceleration value. Braking force is adjusted in line with the optimal target deceleration value at a given point in time. The system compensates for braking system tolerances such as load measuring and brake pad friction behavior, insofar as this is allowed by the permissible control range.
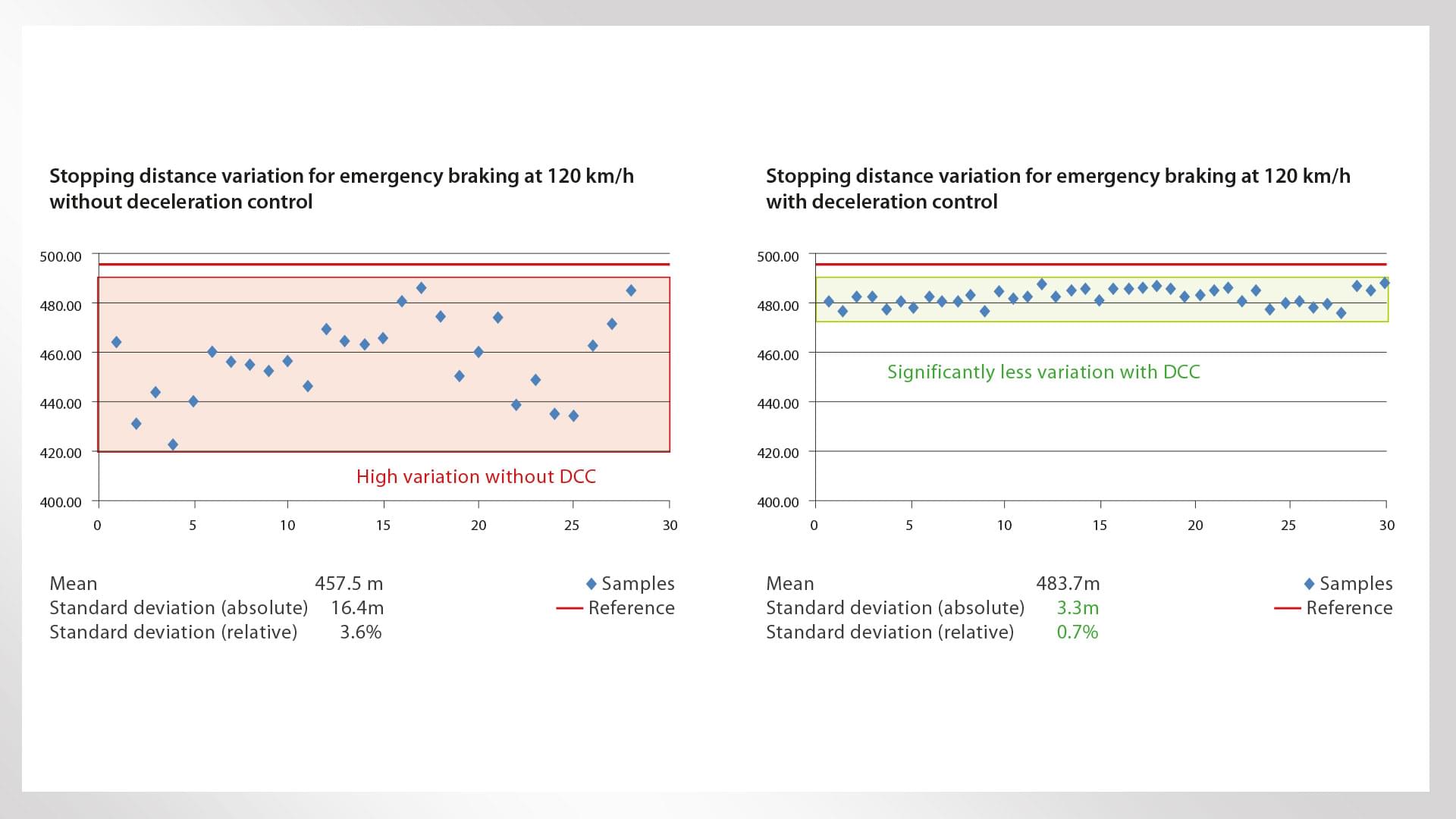
As demonstrated by an extensive trial program (826 test circuits/6210 km) with a NEWAG Impuls 31WE multiple unit in 2019, this significantly reduces the maximum braking distance spread, even for the emergency brake function. When the electronic deceleration control system was activated, the braking distance spread was reduced by up to 85%, even for emergency braking.
For combined electropneumatic and electrodynamic braking, the standard deviation was reduced from 12.8 meters (2.3%) to 1.6 meters (0.3%) in DCC mode. Meanwhile, for emergency braking at a speed of 120 km/h, the standard deviation was reduced from 16.4 meters (3.6%) to 3.3 meters (0.7%) when DCC was activated. In other words, braking distance is now a reliably reproducible design parameter, even for emergency braking [2] (Figure 3).
The second RBD pillar is the enhanced MGS3 wheel slide protection system, featuring the new WSPA3 wheel slide protection algorithm. Conventional wheel slide protection systems are optimized for a control range of 10-20% slippage. However, particularly during the fall, when there are often leaves on the line, there can be situations in which the slippage ranges for optimal adhesion lie outside the standard control range. If the algorithm detects these track conditions, it switches to the newly implemented additional control range for low and extremely low adhesion, ensuring optimal braking force transmission in these conditions, too.
The third RBD pillar is train-wide adhesion management (ADM). Until now, rail vehicles would typically have only one sanded wheelset per direction of travel, if at all. However, new insights and new techniques for calculating sanding effectiveness mean that it is now possible to implement adhesion management across the entire train. The goal is to develop a sanding system distributed across several wheelsets, with a project-specific design for variables such as dirt on the tracks, insulation resistance, sand consumption, installation space and life cycle costs.
The optimized system featuring multiple sanding units increases the available adhesion level, thereby reducing instances of trains overshooting their braking distance in adverse adhesion conditions.
Significantly lower braking distance variation
With conventional braking systems, deceleration has to be reduced by as much as 50% to ensure safe operation on wet tracks. An upgraded braking system with the new deceleration control system, enhanced wheel slide protection system and train-wide ADM can achieve a higher Kwet factor, meaning that deceleration only needs to be reduced by one third. In an operational context, this makes it possible to maintain a high speed for longer and start braking later.
The DCC system has a similar effect in dry operating conditions. The significantly lower braking distance variation means that the train can start braking later and still come to a safe halt within the defined braking distance. Conversely, braking deceleration could be increased, allowing the train to travel at maximum speed for longer (Figure 4 and Figure 5).
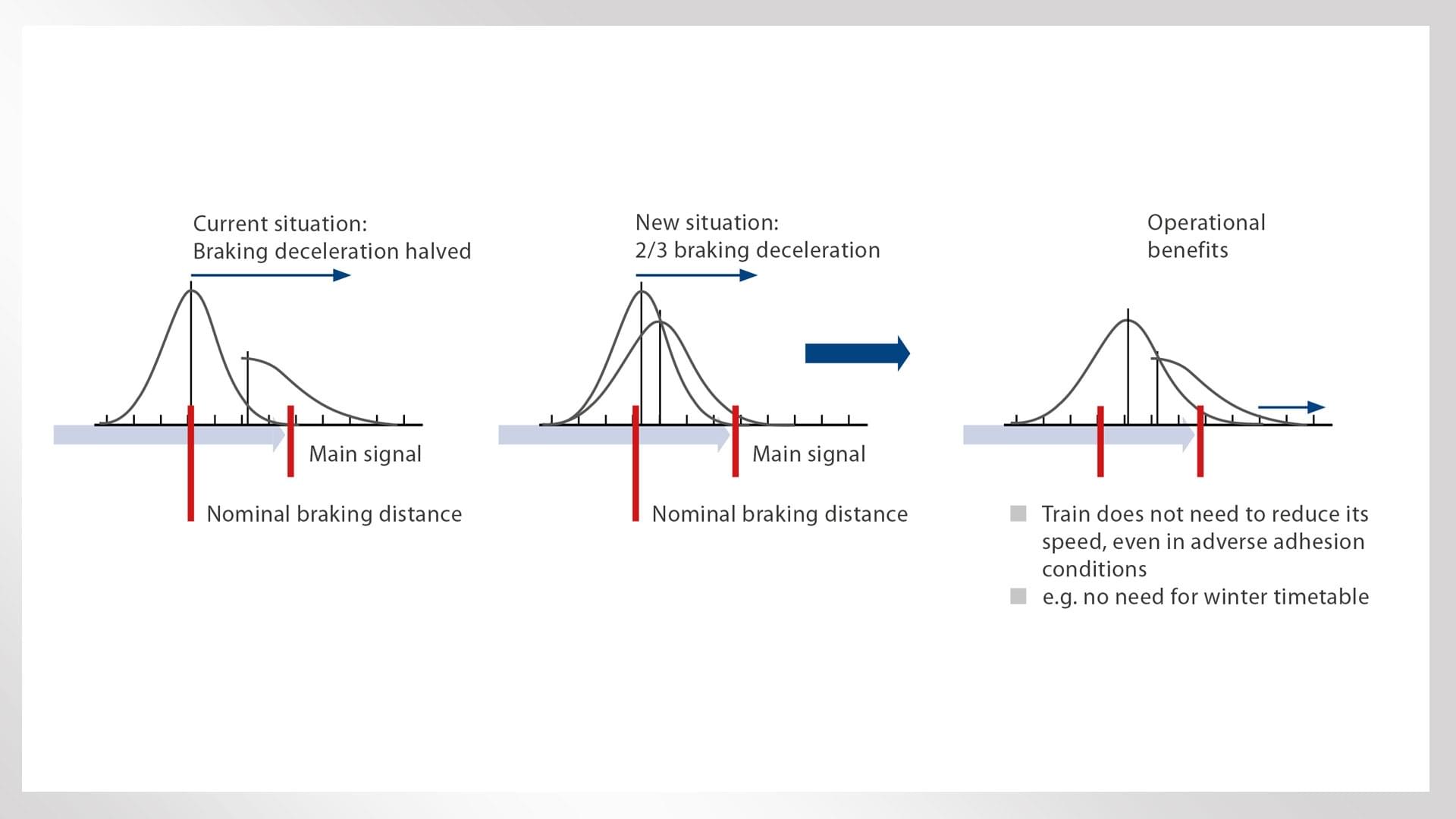
A more reproducible braking distance in adverse conditions could also reduce operational disruptions, enabling improved timetable quality. Put simply, it makes it easier for less experienced drivers to cope with tricky track conditions, as well as reducing the number of occasions when experienced drivers have to drive extra carefully during the fall, thereby preventing delays from accumulating.
A simulation study for the LZB/ETCS Level 2/CTCS-3 train control systems
The value of the approach outlined above is that it enables optimized headways and thus potential increases in capacity, even in conjunction with existing train control systems. This was the focus of a large-scale simulation study carried out last year in cooperation with Berlin’s Institut für Bahntechnik as part of the PINTA2 project of the EU’s Shift2Rail program.
The ‘Open Track’ software tool was used to simulate a typical metro (train length 24 m, weight 47.9 t), S-Bahn train (train length 60 m, weight 148 t), regional multiple unit (train length 72 m, weight 170 t) and high-speed train operating in China (train length 200 m, weight 442 t). The simulated metro, S-Bahn train and regional multiple unit journeys used the LZB/ETCS Level 2/ETCS Level 3 train control systems, while the high-speed train (operating in China) used CTCS-3, which is comparable to ETCS Level 2.
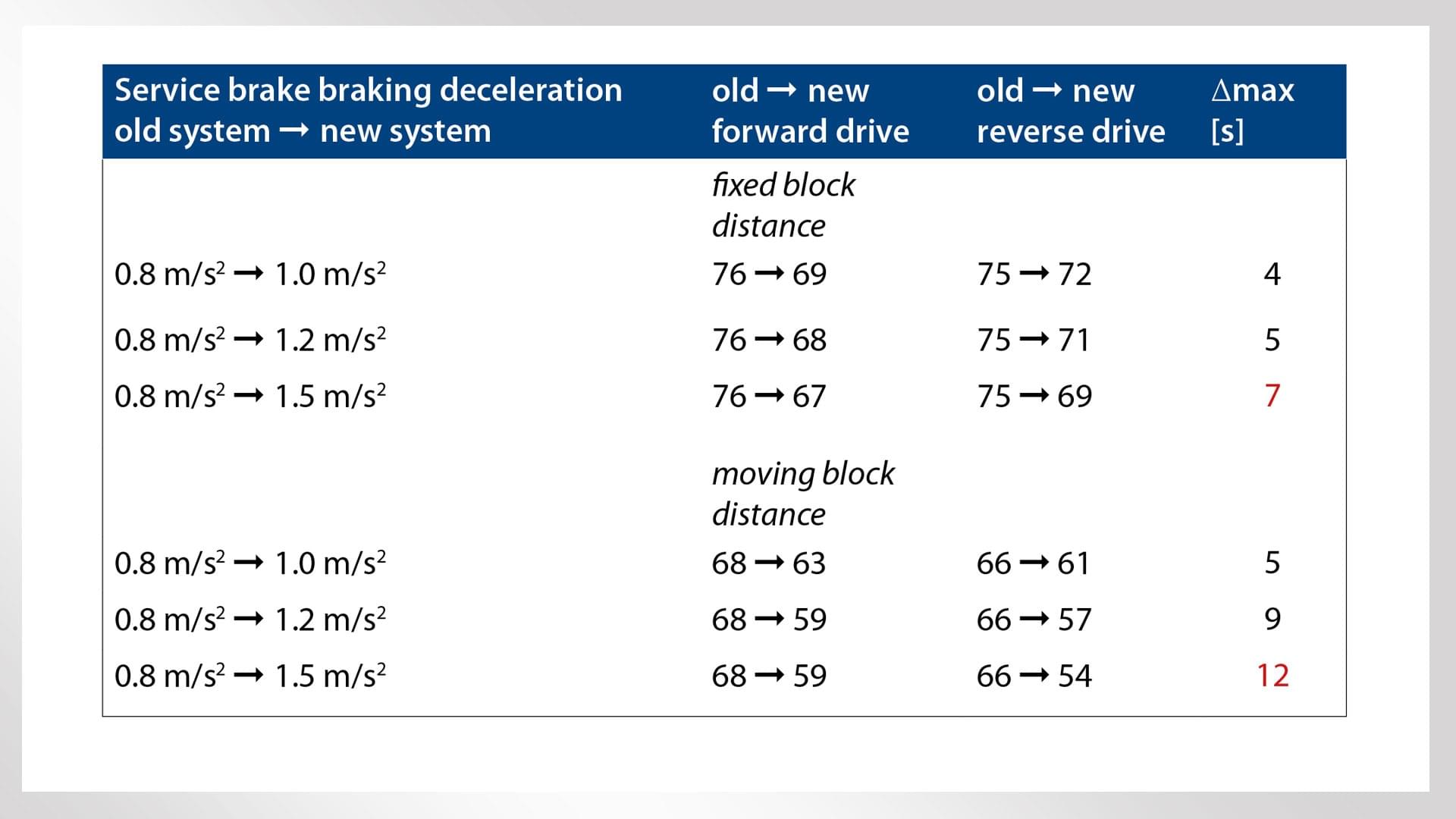
Representative curve radii, gradients, distances between stations and typical station stop times for passenger boarding and alighting were selected to ensure that the results were as realistic as possible. The simulation used deceleration values of between 0.5 m/s2 and 1.5 m/s2 in order to ensure that the different operational adhesion values encountered when switching between aboveground and underground sections of the line were also represented as realistically as possible. Deceleration was increased by 0.1 m/s2 for each simulation interval. The simulations were carried out for both dry and wet track conditions.
Since the OpenTrack simulation software does not calculate precise braking curves for different approach speeds, the simulations only used average instantaneous deceleration values. The relatively short brake build up times were taken into account for the trains simulated using the ETCS Gamma model with direct EP brakes. Using this approximation, it can be assumed that the simulation of the journey time between two stations is sufficiently accurate.
High potential for metro, S-Bahn train and high-speed applications
The results of the simulation show that in some cases there is significant potential for improving infrastructure capacity utilization. The theoretical headway reductions that could be achieved on a dry track – first and foremost due to the lower braking distance variation – are in the following ranges: metros: 9% – 19%, S-Bahn trains: 9% – 16%, regional multiple units: 1.5% – 4%, and high-speed trains (China): up to 20%.
The variations in the theoretical headways are due to the different operating and line parameters and the difference between fixed blocks (Level 2) and moving blocks (Level 3) in the ETCS train control system.
hanks mostly to the greater deceleration value reproducibility enabled by MGS3 and ADM, the ranges for wet tracks were as follows: metros: 10% – 13%, S-Bahn trains: 10% – 12%, regional multiple units: 4% – 7%, high-speed trains (China): up to 20%.
The relatively low potential for regional trains is most likely due to the fact that the distance between signals is rarely optimized in this sector. Especially in rural areas, relatively long block sections with correspondingly long release times are the norm. It is expected that the effect in this setting would be even smaller in practice, since in mixed operation it will always be determined by the braking performance of the train with the lowest deceleration values.
Since the other types of rail transportation in the study mostly have optimized signaling models, the shorter braking distances and reduced braking times enabled by enhanced braking systems have a direct impact on headways.
The effect is larger for metros, with their combination of relatively low speeds, short distances between stations and shorter station stop times (Figure 6). The results of the simulation indicate that the potential for S-Bahn train operation lies within a similar range.
The effect is particularly pronounced (up to 20%) for high-speed train applications. There appear to be two reasons for this. Firstly, the lines in question are optimized for high-speed trains, both topologically and in terms of signaling. And secondly, braking from an initial speed of 300 km/h with higher deceleration values results in a relatively large reduction in the braking distance.
Outlook and wider context
Although the results of the simulation indicate a clear trend, they should not be extrapolated more generally, since conditions in different metro and S-Bahn train networks can vary significantly. It is important to remember that different networks have different bottlenecks that may relate to their control and safety technology, their infrastructure, or even the vehicles themselves. Consequently, project-specific studies are necessary to establish the actual potential for a given use case.
Be that as it may, the results delivered by the Reproducible Braking Distance (RBD) measures offer significant opportunities for the rail industry. Existing regulations would need to be modified to allow the reductions in headways. It is also important to understand that the full potential will only be leveraged if control and safety technology, infrastructure and vehicles/braking systems are all optimized in an integrated manner. There is also potential to increase the frequency of scheduled services in ATO operation. However, even without any changes to the control and safety technology, RBD still improves timetable quality, as well as helping drivers to brake more reliably in difficult conditions. In addition to the improvement in braking performance, better utilization of adhesion for traction can also help to reduce headways.
Since the RBD approach delivers the greatest benefits in urban rail systems and high-speed links between major cities, its widespread deployment can help to address the challenges of the growing trend toward urbanization.
Authors: Matthäus Englbrecht, Heiko Gremmel, Ernst Hohmann, Thomas Linke
References:
[1]: United Nations, Department of Economic and Social Affairs, Population Division (2019). World Urbanization Prospects: The 2018 Revision (ST/ESA/SER.A/420), p. 21
[2]: Ulf Friesen, Ralf Furtwängler, Norman Kreisel, Jörg Braeseke, Dariusz Ciesielski: Verzögerungsgeregeltes Fahrzeug ermöglicht ein stabileres Bremsverhalten in allen Geschwindigkeiten. ZEVrail, February 2020
Print Version
Opening Story